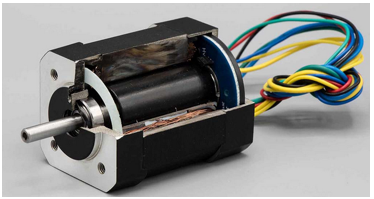
DC Motor แบบ 6 เส้น (แขนซ้ายและขวา) มอเตอร์ไฟฟ้ากระแสตรง (DC Motor) เป็นมอเตอร์ที่เปลี่ยนพลังงานไฟฟ้ากระแสตรงให้เป็นพลังงานกล มอเตอร์ DC ประกอบด้วยส่วนประกอบหลัก ๆ สองส่วน ได้แก่
ขอบคุณ http://www.9engineer.com/index.php?m=article&a=print&article_id=2606 - มอเตอร์ DC แบบขดลวดสนามแม่เหล็กเหนี่ยวนำ เป็นมอเตอร์ DC ที่ขดลวดสนามแม่เหล็กทำจากขดลวด มอเตอร์ประเภทนี้มีข้อดีคือสามารถควบคุมความเร็วได้ แต่มีข้อเสียคือมีต้นทุนสูง ต้องการการดูแลรักษามากกว่า และมีอายุการใช้งานสั้นกว่า
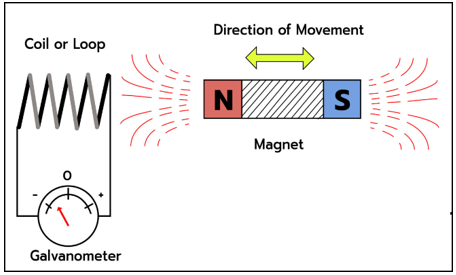
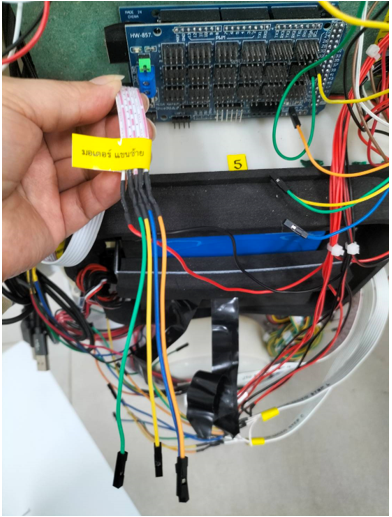
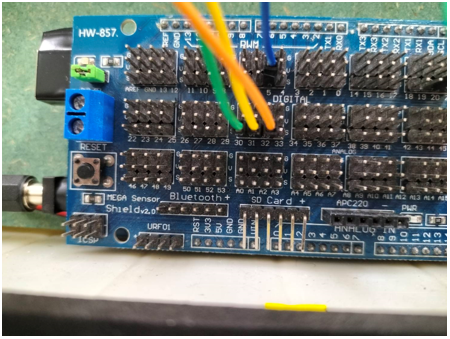
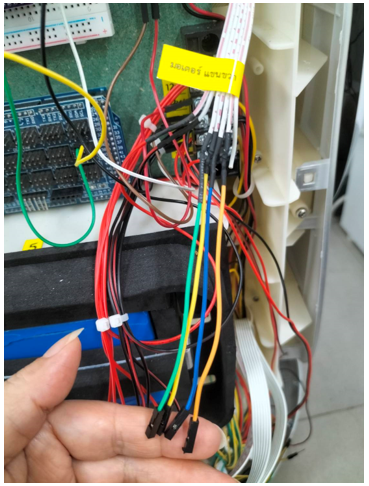
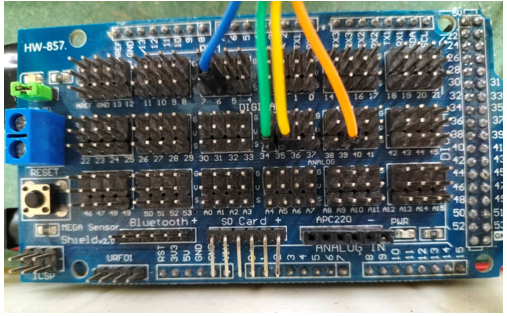
การเหนี่ยวนำแม่เหล็กไฟฟ้า มอเตอร์ DC นิยมใช้กันอย่างแพร่หลายในหลากหลายวงการ เช่น มอเตอร์ DC เป็นมอเตอร์ที่มีประสิทธิภาพสูงและทนทาน เหมาะสำหรับการใช้งานที่หลากหลาย การต่อวงจรแขนซ้าย เส้นที่ 1 สีแดง VCC ต่อที่ Pin 12 โวลต์จากแบตเตอรี่เส้นที่ 2 GND ต่อที่ Pin GND เส้นสีเขียวและสีเหลือง เป็นการควบคุมทิศทางทวนเข็ม ตามเข็ม เส้นที่ 3 สีเขียว ต่อที่ Pin S30 เส้นที่ 4 สีเหลือง ต่อที่ Pin S31 เส้นสีส้ม คือการระบุ Active Motor ให้หมุนหรือหยุด เส้นที่ 5 สีส้ม ต่อที่ Pin S32 สายสีน้ำเงิน ควบคุมความเร็วของ Motor เส้นที่ 6 สีน้ำเงิน ต่อที่ Pin S5
การต่อวงจรแขนขวา เส้นที่ 1 สีแดง VCC ต่อที่ Pin 12 โวลต์จากแบตเตอรี่เส้นที่ 2 สีดำ GND ต่อที่ Pin GND เส้นสีเขียวและสีเหลือง เป็นการควบคุมทิศทางทวนเข็ม ตามเข็ม เส้นที่ 3 สีเขียว ต่อที่ Pin S34 เส้นที่ 4 สีเหลือง ต่อที่ Pin S35 เส้นสีส้ม คือการระบุ Active Motor ให้หมุนหรือหยุด เส้นที่ 5 สีส้ม ต่อที่ Pin S39 สายสีน้ำเงิน ควบคุมความเร็วของ Motor เส้นที่ 6 สีน้ำเงิน ต่อที่ Pin S6
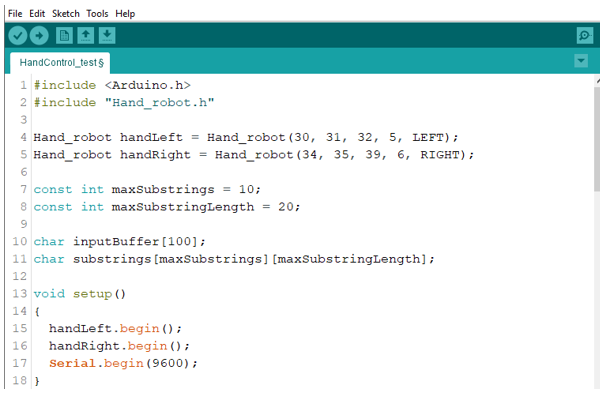
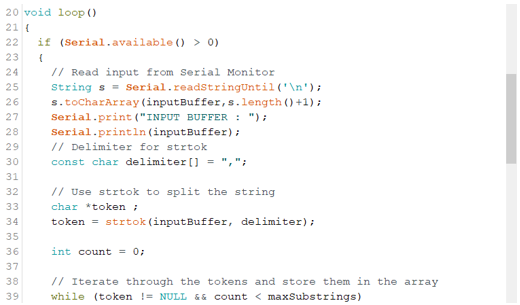
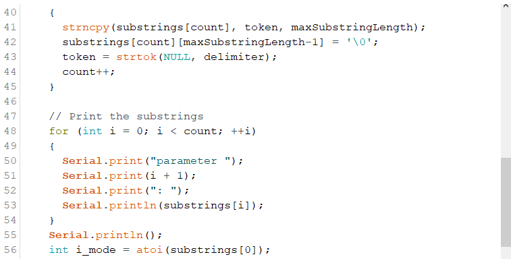
การเขียนโค้ดควบคุม
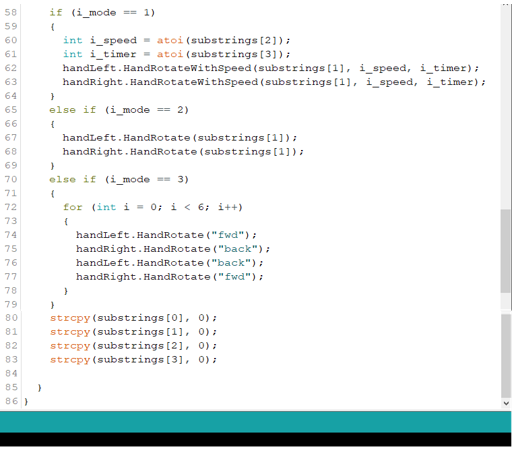
หลักการทำงาน โหมดที่ 2 (HandRotate) กำหนดทิศทาง มี 2 Parameter (Speed และ Time ไม่ต้องกำหนดเซตไว้คือ 100,500)
โหมดที่ 3 มี 1 Parameter กำหนดให้แขนเคลื่อนที่ไปด้านหน้า หลัง สลับกันไปมา 6 ครั้ง (ตามที่กำหนดใน loop)
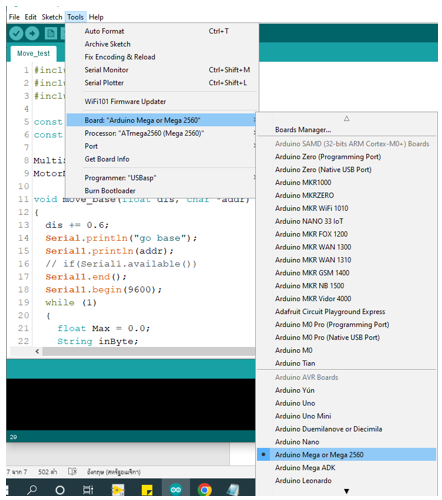
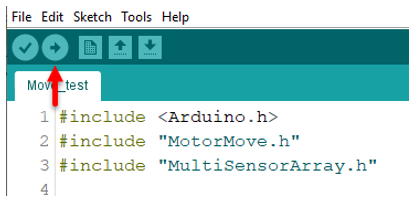
วิธีการอัปโหลดโค้ดลงยังบอร์ด
จากนั้นคลิปุ่มอัปโหลด
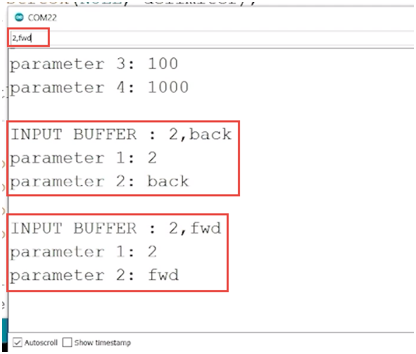
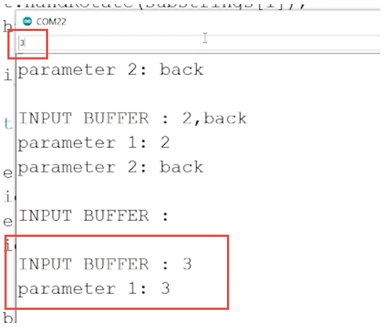
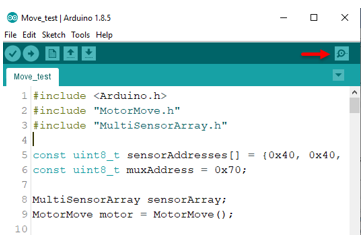
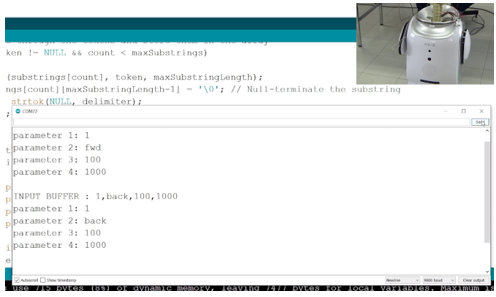
วิธีการทดสอบ คลิกที่ Serial Monitor
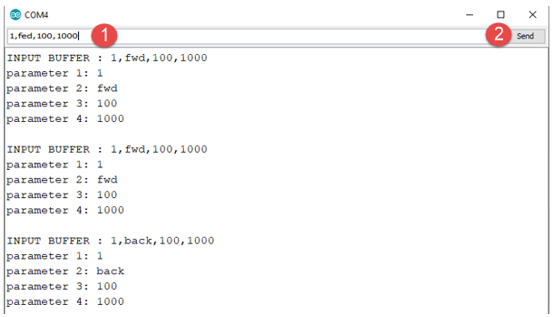
พิมพ์ parameter จากนั้นคลิกที่ปุ่ม Send
|