
 ในการพัฒนาโปรแกรมให้สามารถควบคุมรถหุ่นยนต์ให้เดินตามเส้นทางที่กำหนดได้นั้นเราสามารถที่จะใช้ความสามารถของอุปกรณ์ ในรถหุ่นยนต์เองที่จะทำให้ส่วนการควบคุมของรถหุ่นยนต์ทำอย่างได้อย่างปกติและไปได้ถึงจุดหมายปลายทางได้อย่างถูกต้องและรวดเร็วที่สุด ในการพัฒนาโปรแกรมให้สามารถควบคุมรถหุ่นยนต์ให้เดินตามเส้นทางที่กำหนดได้นั้นเราสามารถที่จะใช้ความสามารถของอุปกรณ์ ในรถหุ่นยนต์เองที่จะทำให้ส่วนการควบคุมของรถหุ่นยนต์ทำอย่างได้อย่างปกติและไปได้ถึงจุดหมายปลายทางได้อย่างถูกต้องและรวดเร็วที่สุด
ซึ่งการเขียนโปรแกรมในการควบคุมรถหุ่นยนต์นั้นสามารถทำได้หลายวิธีและสามารถนำเอากรณีศึกษาที่กล่าวมาแล้วในบทแรก ๆ
มาทำการปรับปรุงให้ส่วนการควบคุมมีประสิทธิภาพมากที่สุด โดยการพัฒนาโปรแกรมให้หุ่นยนต์เดินตามเส้นทางที่กำหนดนั้น เราจะใช้คำสั่ง Sensor
ในการตรวจจับเส้น
ขั้นตอนการดำเนินงาน
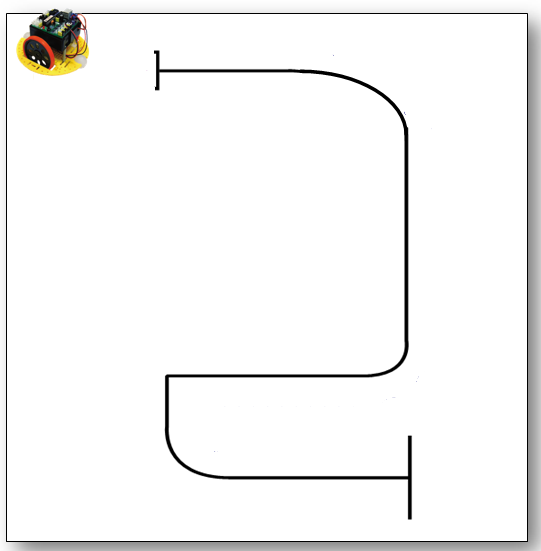
1. ออกแบบสนามและเส้นนำทางที่จะให้รถหุ่นยนต์เดินตามที่กำหนด โดยการกำหนดรูปแบบของสนามและเส้นนำทางนั้น ตัวพื้นสนามกำหนดให้เป็นสีขาว และเส้นนำทางจะต้องเป็นสีดำ
 1.1 ตัวพื้นสนามให้มีขนาดประมาณ 2300 x 1100 มม. สีขาว วัสดุที่เลือกใช้นั้นสามารถใช้ได้ทั้ง กระดาษ พลาสติก หรือไม้อัด 1.1 ตัวพื้นสนามให้มีขนาดประมาณ 2300 x 1100 มม. สีขาว วัสดุที่เลือกใช้นั้นสามารถใช้ได้ทั้ง กระดาษ พลาสติก หรือไม้อัด
1.2 เส้นนำทางให้มีขนาด 18 – 20 มม. สีดำ วัสดุที่เลือกใช้อาจเป็นเทปพันสายไฟสีดำหรือสติกเกอร์สีดำก็สามารถนำมาตัดทำเป็นเส้นนำทางได้
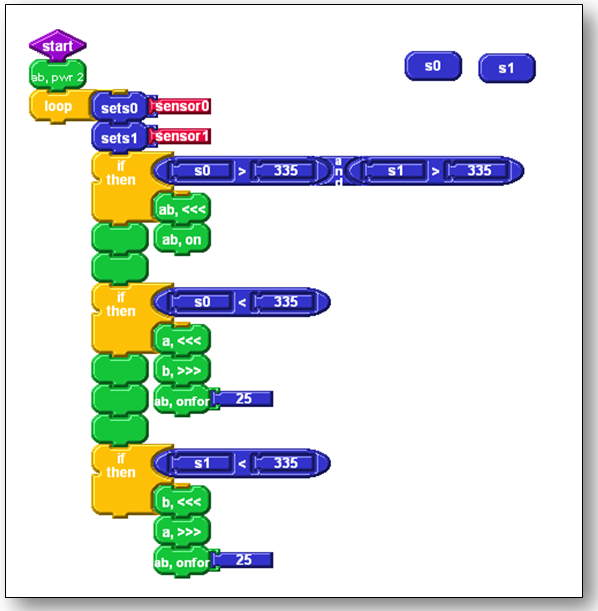
2. เขียนโปรแกรมควบคุมรถหุ่นยนต์ตามเงื่อนไขที่เรากำหนดโดยใช้กรณีศึกษาวิธีการกำหนดไม่ให้รถหุ่นยนต์เคลื่อนที่ออกนอกเส้นทางทั้งหมดทุกรูปแบบ
เพื่อให้ ตรวจสอบและสั่งงานตามเงื่อนไขให้ส่วนควบคุมกำลังขับเคลื่อนหรือที่เราเรียกว่า มอเตอร์ A มอเตอร์ B เคลื่อนที่ไปตามเป้าหมายที่กำหนด


เขียนโปรแกรมควบคุมการเดินหน้าของรถหุ่นยนต์ ตรวจสอบค่า SensorA ตรวจแสงสะท้อน
 เงื่อนไขที่ 1 เงื่อนไขที่ 1
โปรแกรมจะใช้ Loop ในการวนตรวจสอบแสงสะท้อนโดยใช้ เซนเซอร์ Sensor0 Sensor1 ว่ามีค่าแสงสะท้อนเท่าใด และใช้ If then  ในการเปรียบเทียบเงื่อนไข โดยกำหนดรูปแบบว่า ในการเปรียบเทียบเงื่อนไข โดยกำหนดรูปแบบว่า
 ที่อยู่ทางซ้ายของรถหุ่นยนต์ ตรวจแสงสะท้อนมีค่าที่ มากกว่า 335 ที่อยู่ทางซ้ายของรถหุ่นยนต์ ตรวจแสงสะท้อนมีค่าที่ มากกว่า 335

 ที่อยู่ทางซ้ายของรถหุ่นยนต์ ตรวจแสงสะท้อนมีค่าที่ มากกว่า 335 ที่อยู่ทางซ้ายของรถหุ่นยนต์ ตรวจแสงสะท้อนมีค่าที่ มากกว่า 335
แสดงว่า  ตัวตรวจแสงสะท้อนเป็นค่าของ สีขาว โปรแกรมจะสั่งให้
รถหุ่นยนต์ทั้งมอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้า ตัวตรวจแสงสะท้อนเป็นค่าของ สีขาว โปรแกรมจะสั่งให้
รถหุ่นยนต์ทั้งมอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้า 

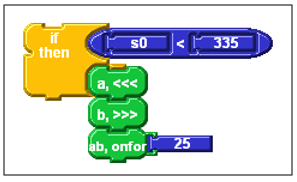
เงื่อนไขที่ 2
โปรแกรมจะใช้ Loop ในการวนตรวจสอบแสงสะท้อนโดยใช้ เซนเซอร์ Sensor0 Sensor1 ว่ามีค่าแสงสะท้อนเท่าใด และใช้ If then ในการเปรียบเทียบเงื่อนไข โดยกำหนดรูปแบบว่า
ที่อยู่ทางซ้ายของรถหุ่นยนต์ ตรวจแสงสะท้อนมีค่าที่ น้อยกว่า 335
แสดงว่า ตัวตรวจแสงสะท้อนเป็นค่าของ สีดำ โปรแกรมจะสั่งให้รถหุ่นยนต์โดยกำหนดให้มอเตอร์ A เคลื่อนที่เดินหน้า และมอเตอร์ B เคลื่อนที่ถอยหลัง  ตามระยะทางที่กำหนด ตามระยะทางที่กำหนด
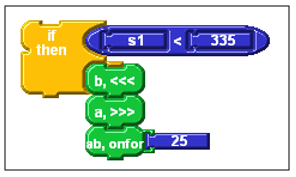
เงื่อนไขที่ 3
โปรแกรมจะใช้ Loop ในการวนตรวจสอบแสงสะท้อนโดยใช้ เซนเซอร์ Sensor0 Sensor1 ว่ามีค่าแสงสะท้อนเท่าใด และใช้ If then ในการเปรียบเทียบเงื่อนไข โดยกำหนดรูปแบบว่า
อยู่ทางซ้ายของรถหุ่นยนต์ ตรวจแสงสะท้อนมีค่าที่ น้อยกว่า 335
แสดงว่า ตัวตรวจแสงสะท้อนเป็นค่าของ สีดำ โปรแกรมจะสั่งให้รถหุ่นยนต์โดยกำหนดให้มอเตอร์ A เคลื่อนที่เดินหน้า และมอเตอร์ B เคลื่อนที่ถอยหลัง ตามระยะทางที่กำหนด


|
