การเคลื่อนที่ของรถหุ่นยนต์นั้นจะอาศัยมอเตอร์ทั้งสองเป็นตัวควบคุมการเคลื่อนที่ โดยรูปแบบการเคลื่อนที่นั้นจะสั่งให้มอเตอร์ A และ มอเตอร์ B เคลื่อนที่ไปในทิศทางตามต้องการโดยที่รูปแบบของคำสั่งก็สามารถที่จะพัฒนา หรือดัดแปลงจากหลักการทำงานของโปรแกรมหลักมาพัฒนาเพิ่มเติมได้ เพื่อให้ประสิทธิภาพในการเคลื่อนที่ของรถหุ่นยนต์มีประสิทธิภาพมากยิ่งขึ้น
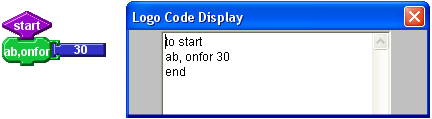
รูปแบบการเขียนโปรแกรมสั่งงานให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้านั้นสามารถทำได้โดยการเลือกสั่งให้ มอเตอร์ A มอเตอร์ B เคลื่อนที่ไปข้างหน้าตามระยะทางที่กำหนดโดยรูปแบบของคำสั่งในโปรแกรม Logo Blocks คือ
โดยปกติหากมีการสั่งมอเตอร์ A และมอเตอร์ B เปิดการทำงานอยู่ในสถานะ ON มอเตอร์ A และมอเตอร์ B จะหมุนเดินหน้า ซึ่งทิศทางการหมุนของมอเตอร์ A และมอเตอร์ B นั้นจะหมุนในลักษณะทิศทางตรงกันข้ามกัน คือ มอเตอร์ A จะหมุนในทิศทางตามเข็มนาฬิกา ส่วน มอเตอร์ B จะหมุนในทิศทางทวนเข็มนาฬิกา รูปแสดงทิศทางการหมุนของมอเตอร์
นอกเหนือจากคำสั่ง
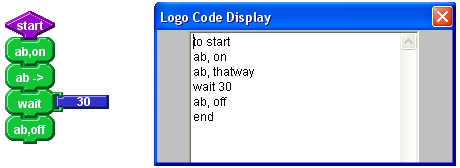
รูปแบบการเขียนโปรแกรมโดยใช้ หากใช้รูปแบบการเขียนคำสั่งแบบแรกจะต้องมีการกำหนดระยะเวลาด้วยคำสั่ง
รูปแบบการเขียนโปรแกรมโดยใช้ เปรียบเทียบรูปแบบการเขียนโปรแกรมให้รถหุ่นยนต์เดินหน้า
รูปแบบการเขียนโปรแกรมสั่งงานให้รถหุ่นยนต์เคลื่อนที่ไปด้านหลังนั้นสามารถทำได้โดยการเลือกสั่งให้ มอเตอร์ A มอเตอร์ B เคลื่อนที่ไปด้านหลังตามระยะทางที่กำหนด โดยรูปแบบของคำสั่งในโปรแกรม Logo Blocks คือ
โดยปกติหากมีการสั่งมอเตอร์ A และมอเตอร์ B เปิดการทำงานอยู่ในสถานะ ON มอเตอร์ A และมอเตอร์ B จะหมุนเดินหน้า เราจะใช้คำสั่ง
หากใช้รูปแบบการเขียนคำสั่งแบบแรกจะต้องมีการกำหนดระยะเวลาด้วยคำสั่ง เปรียบเทียบรูปแบบการเขียนโปรแกรมให้รถหุ่นยนต์ถอยหลัง
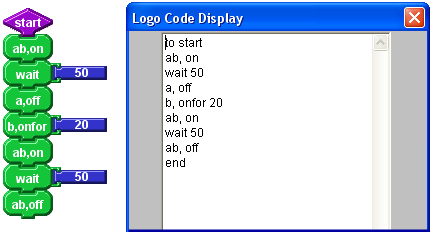
การเขียนคำสั่งให้รถหุ่นยนต์เคลื่อนที่เป็นรูปสี่เหลี่ยมทางขวา
รูปแบบการเขียนโปรแกรมควบคุมรถหุ่นยนต์จะเริ่มจากการสั่งให้โปรแกรมตรวจสอบ
รูปแบบการเขียนโปรแกรมควบคุมรถหุ่นยนต์จะเริ่มจากการสั่งให้โปรแกรมตรวจสอบการวนลูปทำงานของคำสั่งที่กำหนดให้ มอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้าตามระยะเวลาที่กำหนด จากนั้นสั่งให้มอเตอร์ B หมุนถอยหลังเป็นเวลา 4 วินาที
รูปแบบการเขียนโปรแกรมควบคุมรถหุ่นยนต์จะเริ่มจากการสั่งให้โปรแกรมตรวจสอบ การวนลูปทำงานของคำสั่งที่กำหนดให้ มอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้า จากนั้นสั่งให้มอเตอร์ A หมุนถอยหลัง
รูปแบบการเขียนโปรแกรมควบคุมรถหุ่นยนต์จะเริ่มจากการสั่งให้โปรแกรมตรวจสอบ การวนลูปทำงานของคำสั่งที่กำหนดให้ มอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้า จากนั้นสั่งให้มอเตอร์ B หมุนถอยหลัง
รูปแบบการเขียนโปรแกรมควบคุมรถหุ่นยนต์จะเริ่มจากการสั่งให้ มอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้า จากนั้นกำหนดให้โปรแกรมตรวจสอบการวนลูปตามรูปแบบ กำหนดให้มอเตอร์ A หยุดหมุน
รูปแบบการเขียนโปรแกรมควบคุมรถหุ่นยนต์จะเริ่มจากการสั่งให้ มอเตอร์ A และมอเตอร์ B เคลื่อนที่ถอยหลัง จากนั้นกำหนดให้โปรแกรมตรวจสอบการวนลูปตามรูปแบบ กำหนดให้มอเตอร์ A หยุดหมุน
แสดงภาพกรณีการเลี้ยวแบบล้อเดียว ตัวอย่างการเขียนโปรแกรมให้หุ่นยนต์เลี้ยวทางขวาแบบล้อเดียว
โปรแกรมเริ่มต้นสั่งงานให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้าเป็นเวลา 5 วินาที จากนั้นสั่งให้ มอเตอร์ a หยุดหมุน และมอเตอร์ b หมุนเป็นเวลา 2 วินาที ซึ่งจะทำให้รถหุ่นยนต์เลี้ยวขวา หลังจากเลี้ยวขวาเสร็จเรียบร้อยแล้ว ให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้าเป็นเวลา 5 วินาที แล้วสั่งให้ มอเตอร์ a และ มอเตอร์ b หยุดหมุน ตัวอย่างการเขียนโปรแกรมให้หุ่นยนต์เลี้ยวทางซ้ายแบบล้อเดียว
โปรแกรมเริ่มต้นสั่งงานให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้าเป็นเวลา 5 วินาที จากนั้นสั่งให้ มอเตอร์ b หยุดหมุน และมอเตอร์ a หมุนเป็นเวลา 2 วินาที ซึ่งจะทำให้รถหุ่นยนต์เลี้ยวซ้าย หลังจากเลี้ยวซ้ายเสร็จเรียบร้อยแล้ว ให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้าเป็นเวลา 5 วินาที แล้วสั่งให้มอเตอร์ a และ มอเตอร์ b หยุดหมุน
กรณีการเลี้ยวแบบสองล้อ ตัวอย่างการเขียนโปรแกรมเลี้ยวขวาแบบสองล้อ
ตัวอย่างการเขียนโปรแกรมให้หุ่นยนต์เลี้ยวทางขวาแบบสองล้อ
โปรแกรมเริ่มต้นสั่งงานให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้า เป็นเวลา 5 วินาที แล้วสั่งให้ มอเตอร์ a หมุนกลับไปด้านหลัง เป็นเวลา 1 วินาที ซึ่งจะทำให้รถหุ่นยนต์เลี้ยวไปทางด้านขวามือ จากนั้นสั่งให้มอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้าอีก เป็นเวลา 5 วินาที ตัวอย่างการเขียนโปรแกรมให้หุ่นยนต์เลี้ยวทางซ้ายแบบสองล้อ
โปรแกรมเริ่มต้นสั่งงานให้รถหุ่นยนต์เคลื่อนที่ไปข้างหน้า เป็นเวลา 5 วินาที แล้วสั่งให้ มอเตอร์ b หมุนกลับไปด้านหลัง เป็นเวลา 1 วินาที ซึ่งจะทำให้รถหุ่นยนต์เลี้ยวไปทางด้านซ้ายมือ จากนั้นสั่งให้มอเตอร์ A และมอเตอร์ B เคลื่อนที่ไปข้างหน้าอีก เป็นเวลา 5 วินาที
|

 ทักษะการบังคับรถหุ่นยนต์เคลื่อนที่ตามที่กำหนด
ทักษะการบังคับรถหุ่นยนต์เคลื่อนที่ตามที่กำหนด